新型激光雷达车辆分离系统方案
传统车辆分离技术主要使用地感线圈以及红外光栅方式,但随着经济的快速发展以及汽车持有量的持续增长,传统的车辆分离技术也暴露出很多弊端,在收费站经常造成跟车距离太近ETC扣费误判等现象;又例如地感线圈寿命短、准确性差和安装需要破坏路面等缺点被越来越多的诟病;红外光栅容易受到强光影响,抗干扰性差、安装维护较难等因素。基于现实也推出了全新的利用激光雷达进行车辆分离的技术。
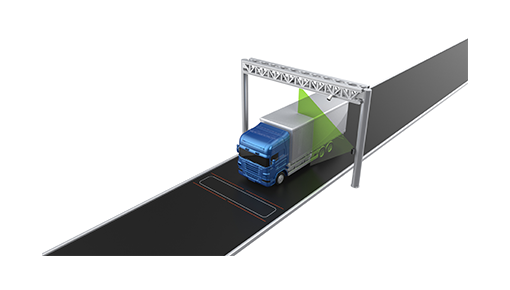
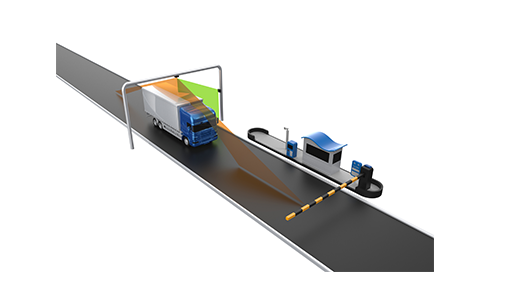
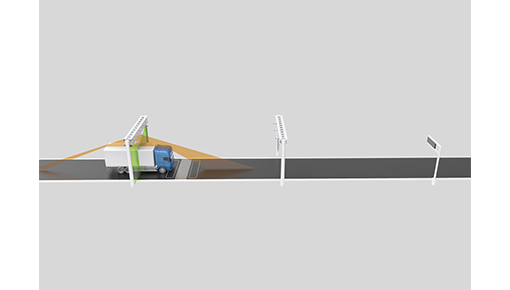
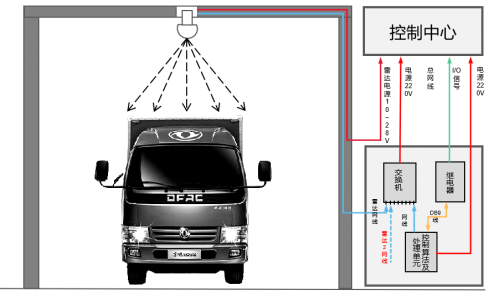
傲视智绘车辆分离系统利用激光雷达高射激光脉冲对车道进行反射式扫描测量,并且可对连续行驶的车辆进行高效检测,有效提升高峰时期过站车辆行驶密集、外界环境干扰强烈时的测量稳定性,并且易安装、安全性高、可适用各种安装环境的特点,实际应用中逐渐凸显优势。可安装在高速收费站、国省道非现场执法和源头治超出口。
系统特点:
1)抗干扰能力强:抗强光高达80000Lux以上,不受光照条件和车辆颜色影响;自适应匹配滤波算法专利技术,提升气象条件适应性;
2)检测能力强:高频的激光扫描测量几乎可探测车道内任何颜色和形状的物体,一览无遗;
3)检测精度高:在非极端天气环境下,分车准确率≥99.5%以上;
4)多车道覆盖:本系统可应用于单车道或多车道,双车道以上系统可支持车辆跨道行驶精准检测;
5)功能选配多:系统可实现车辆分离、车辆宽高测量、超宽超高车辆报警、车流量统计、支持统计时间自定义、多车道可实现精确跨道检测、跨道统计等,用户可根据实际需要进行功能选择;
6)整体投入少:单台激光雷达反射式测量,单侧/吊安装,对安装角度精度要求低,安装维护方便。较传统红外对射和地感线圈,从施工维护方面考虑,综合成本低。
系统功能:
车辆分离功能,包括车道区域设置、分车报警功能
1)分车报警功能:当有车辆进入设置区域时,系统输出告警,当车辆离开设置区域,系统取消告警。
2)车道区域宽高设置:根据实际检测场景测量结果设置软件参数,确定要检测的车道区域范围。
3)目标车辆最小宽高及高度设定:系统可进行车辆宽度和高度的测量,还可设置最小宽高值,车辆只有在不满足设定的高度和宽度的情况时,才输出报警。
4)车道区域触发机制设置(报警延迟、消警延迟):报警延迟:当车辆进入车道区域时,系统不立即输出报警,而是在达到指定帧的延迟后才报警;消警延迟:当车辆离开车道区域时,系统不立即消警,而是在指定帧的延迟后才消警。
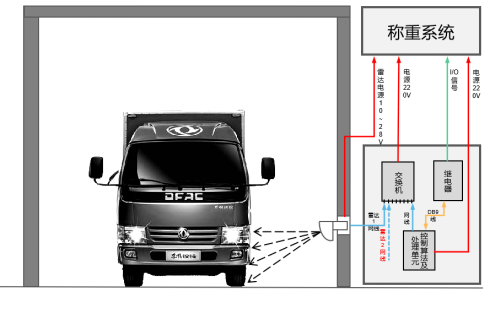
5)IO关联设置:根据用户接入方式和接口形式数据设置软件参数,系统支持不同车道进行不同IO输出设置。
安装方式:
推荐新闻
-
2022-07-25
7月27日-28日,中国高速公路信息化大会等你来
2022年7月27-28日,第二十四届中国高速公路信息化大会在长沙国际会展中心举办。宁波傲视智绘光电科技有限公司将参展本...
-
2022-03-22
公路治超黑科技:激光雷达车辆超高超限检测
智能交通系统是未来交通系统的发展方向,它是将先进的信息技术、数据通讯传输技术、电子传感技术、控制技术及计算机技术等有效地...
-
2021-10-18
科技治超,让超载超限无处藏
治超非现场执法是是科技治超中的主要依托,宁波傲视智绘光电科技有限公司顺应国家ETC及公路治超政策趋势,基于激光雷达技术研...
-
2021-10-11
一种公路收费无障碍的动态称重系统
动态称重系统通过对车辆数据的记录和行为的监控,对特征参数的逻辑分析可以准确判断车辆行驶的状态和作弊行为,并能够有效避免雨...