车辆外轮廓测量系统有三大出色功能
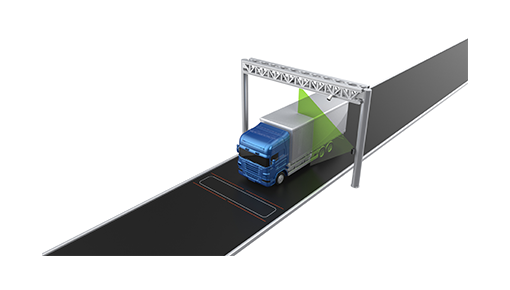
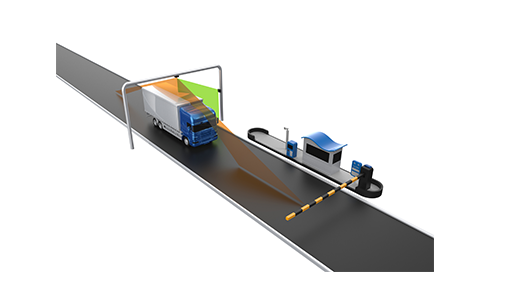
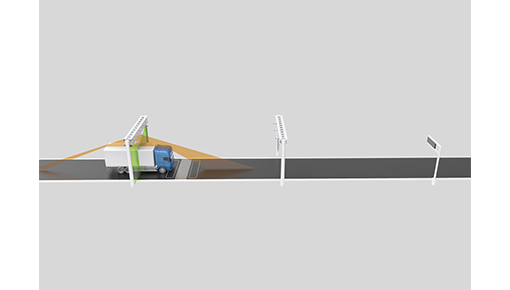
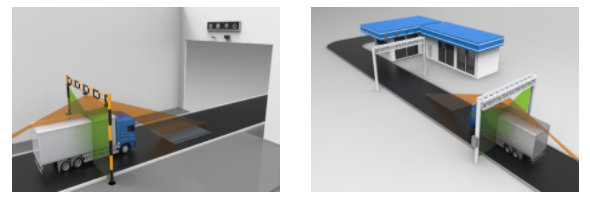
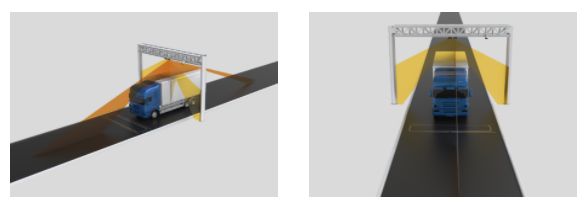
车辆外轮廓测量系统采用先进的激光扫描技术,实现动态和实时测量,车辆不需要停车检测,以正常行驶速度通过检测设备区域时,多个宽高雷达扫描车辆行驶过程中的的侧面,得到切片点云数据,结合长雷达的点云数据,通过软件系统的智能算法,合成为车辆完整的点云数据,计算出车辆的外廓尺寸数据。系统测量精度高,体积小、结构设计紧凑、集成度高,既适合高速预检及低速精检的车辆外廓长宽高的检测,也可应用于高速公路入口治超、国省道非现场执法和车辆检测中心等场景。
工作原理:
傲视智绘车辆外轮廓测量系统通过激光雷达的高速动态扫描,不仅使车辆在行驶通过检测区域时可以瞬时获取轮廓数据,计算出车辆长、宽、高、车速、车轴等信息,还可以通过激光雷达扫描出车辆三维点云轮廓图像,精准区分车辆实现准确的车辆分离和计数,与压点传感器数据融合获取准确的车轴数。实现24小时实时监控,为车辆检测提供精准可靠的依据,并且整个检测过程自动、动态、可视化,且无需人为干预,有效缓解工作人员的压力。
车辆外轮廓测量系统功能:
1、车辆外廓测量功能:(包括车道区域长宽高、车辆长宽高测量、分车报警功能、车道区域触发机制、)
①、车辆长宽高测量功能:当车辆通过测量区域后,准确测量通过车辆的长、宽、高最大尺寸;
②、车道区域长宽高设置:根据实际检测场景测量结果设置软件参数,确定要检测的车道区域范围;
③、目标车辆最小长宽高设定:可设置检测车辆的最小长、宽、高值,车辆只有在不满足设定的长度、高度和宽度的情况下,才输出报警。
2、车辆分离功能:
①、分车报警功能:当有车辆进入设置区域时,系统输出告警,当车辆离开设置区域,系统取消报警;
②、车道区域触发机制设置:报警延迟:当车辆进入车道区域时,系统不立即输出报警,而是在达到指定帧的延迟后才报警;消警延迟:当车辆离开车道区域时,系统不立即消警,而是在指定帧的延迟后才消警。
3、车辆分型功能:
①、系统根据当前车辆的三维点云图像和外型尺寸,与数据库中的车辆数据进行匹配,对车型进行分类和统计。系统支持对车型的统计和查询功能,查询类别和查询时间自定义功能。
推荐新闻
-
2022-07-25
7月27日-28日,中国高速公路信息化大会等你来
2022年7月27-28日,第二十四届中国高速公路信息化大会在长沙国际会展中心举办。宁波傲视智绘光电科技有限公司将参展本...
-
2022-03-22
公路治超黑科技:激光雷达车辆超高超限检测
智能交通系统是未来交通系统的发展方向,它是将先进的信息技术、数据通讯传输技术、电子传感技术、控制技术及计算机技术等有效地...
-
2021-10-18
科技治超,让超载超限无处藏
治超非现场执法是是科技治超中的主要依托,宁波傲视智绘光电科技有限公司顺应国家ETC及公路治超政策趋势,基于激光雷达技术研...
-
2021-10-11
一种公路收费无障碍的动态称重系统
动态称重系统通过对车辆数据的记录和行为的监控,对特征参数的逻辑分析可以准确判断车辆行驶的状态和作弊行为,并能够有效避免雨...